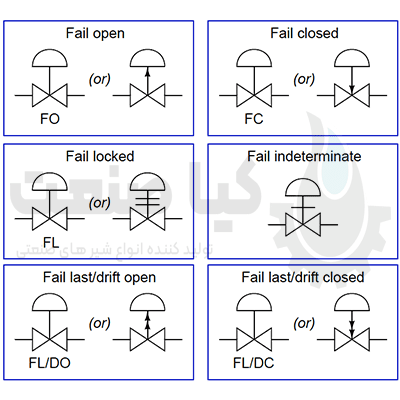
حالت خرابی شیر کنترل در نمودارهای ابزار با فلش نشان داده شود (با فرض اینکه بدنه شیر مستقیماً در جایی که حرکت ساقه به سمت بدنه بسته می شود و حرکت ساقه دور از بدنه باعث باز شدن برش شیر می شود) و یا اختصاراتی مانند “FC” (شکست بسته) و “FO” (باز نشدن) نماش داده می شود.
حالت های خرابی دیگر نیز توسط مجموعه ای از نمادهای دیگر که در ادامه بررسی می کنیم نمایش داده می شود.
حالت خرابی شیر کنترل
برای اینکه یک شیر پنوماتیک یا هیدرولیک در حالت قفل شده از کار بیفتد، یک دستگاه خارجی باید فشار سیال را در دیافراگم محرک یا محفظه پیستون در صورت از دست دادن فشار تغذیه، حبس کند.
کنترل ولوهایی که در جای خود از کار می افتند و در یک جهت خاص حرکت می کنند معمولاً توسط محرک های پیستونی پنوماتیک دو کاره فعال می شوند.
این اکچویتورها از فنر برای ارائه یک حالت خرابی قطعی استفاده نمی کنند، بلکه از فشار هوا هم برای باز کردن و هم برای بستن شیر استفاده می کنند.
در صورت از دست دادن فشار هوا، اکچویتور نمی تواند شیر را باز یا بسته کند و بنابراین تمایل دارد در موقعیت خود باقی بماند.
اگر از گلاب ولو با تریم نامتعادل باشد، نیروهای وارد شده به پلاگ سوپاپ آن را در یک جهت حرکت می دهد (که باعث رانش می شود).
انتخاب حالت شکست مناسب
توجه به این نکته مهم است که چگونه حالت خرابی یک شیر اغلب به عملکرد کنترل آن (هوا باز، هوا به بسته) مرتبط است. یعنی یک شیر کنترل پنوماتیک هوا باز با از دست دادن فشار هوا بسته می شود و بالعکس
این یک واقعیت مهم است زیرا مهندسی ایمنی خوب مستلزم آن است که عوامل خطر فرآیند به جای کنترل قرارداد یا عادت سیستم، حالت صحیح خرابی شیر را تعیین کنند.
درک عملکرد یک شیر کنترل هوا به باز نسبت به دریچه هوا به بسته (سیگنال بیشتر = جریان سیال فرآیند بیشتر) برای مردم آسان تر است، اما این نباید یک اصل راهنما در انتخاب شیر باشد.
دریچههای کنترل هوا شیرهای پنوماتیک به باز به طور طبیعی بسته میشوند،.
به این معنی که تنها در صورتی برای یک برنامه کنترل فرآیند خاص مناسب هستند .
که این فرآیند با شیر بستهشده ایمنتر از دریچههای باز شکست خورده باشد.
اگر فرآیند با یک شیر باز شکسته ایمنتر باشد، شیر کنترلی که به صورت پنوماتیکی برای آن کاربرد مشخص شده است باید هوا به بسته باشد.
ابتدا ایمن ترین حالت خرابی شیر کنترل را تعیین کنید.
سپس اقدامات ابزار را به گونه ای انتخاب و یا پیکربندی کنید که محتمل ترین حالت های خرابی مسیر سیگنال منجر به حرکت مداوم شیر کنترل به ایمن ترین موقعیت شود.
به عنوان مثال، این سیستم خنک کننده خودکار را برای یک موتور بزرگ تولید کننده انرژی در نظر بگیرید:
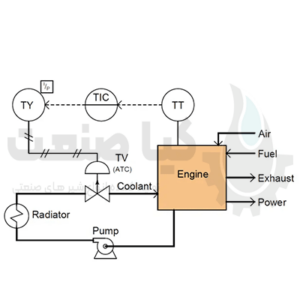
بدیهی است که بسته شدن شیر برای موتور خطرناکتر از باز نشدن شیر است. اگر شیر بسته نشود، مطمئناً موتور به دلیل عدم خنک کننده بیش از حد گرم می شود.
اگر باز نشود، موتور صرفاً خنکتر از آنچه طراحی شده کار میکند و تنها پیامد منفی آن کاهش راندمان است.
با در نظر گرفتن این موضوع، تنها انتخاب معقول برای یک شیر کنترل، شیری است که باز نشود (هوا به بسته).
با این حال، انتخاب های ما در عمل ابزار به شیر کنترل ختم نمی شود.
ترانسمیتر دما، کنترلر و مبدل I/P چگونه باید پیکربندی شوند تا عمل کنند؟
در هر مورد، پاسخ باید این باشد که به گونهای عمل کنید که در صورت محتملترین خطای سیگنال ورودی، شیر به طور پیشفرض به موقعیت ایمن خود (کاملا باز) برسد.
با گام برداشتن از طریق سیستم کنترل از شیر به سنسور دما، ابزار بعدی که با آن مواجه می شویم مبدل I/P است. البته کار آن تبدیل سیگنال جریان 4-20 میلی آمپر به فشار پنوماتیکی است که محرک شیر می تواند از آن استفاده کند.
از آنجایی که می دانیم حالت خرابی سوپاپ بر اساس از دست دادن فشار هوای فعال است، می خواهیم I/P به گونه ای پیکربندی شود که در صورت بروز خطای الکتریکی در ورودی 4-20 میلی آمپر، حداقل فشار را تولید کند. سیم کشی سیگنال
چه سیم کشی کوتاه شود یا باز نشود، نتیجه 0 میلی آمپر در پایانه های ورودی I/P خواهد بود.
بنابراین، پیکربندی مبدل I/P باید مستقیم باشد، به طوری که یک سیگنال ورودی 4 تا 20 میلی آمپر فشار خروجی 3 تا 15 PSI را تولید کند (یعنی حداقل جریان ورودی حداقل فشار خروجی را ایجاد می کند).
ابزار بعدی در حلقه، کنترلر است. در اینجا، ما میخواهیم محتملترین شکست سیگنال ورودی منجر به حداقل سیگنال خروجی شود، بنابراین شیر (یک بار دیگر) به طور پیشفرض در موقعیت «ایمن شکست» قرار میگیرد.
در نتیجه، باید کنترلکننده را برای عملکرد مستقیم پیکربندی کنیم، دقیقاً مانند مبدل I/P (یعنی کاهش سیگنال PV از یک سیم شکسته یا اتصال شل در مدار ورودی منجر به کاهش سیگنال خروجی میشود).
در نهایت به آخرین ابزار در حلقه کنترل می رسیم:
فرستنده دما (TT). مانند اکثر ابزارها، ما این گزینه را داریم که آن را برای عملکرد مستقیم یا معکوس پیکربندی کنیم.
آیا باید مستقیم (یعنی موتور داغتر = خروجی mA بیشتر) یا معکوس (موتور داغتر = خروجی mA کمتر) را انتخاب کنیم؟
در اینجا، انتخاب ما باید به گونه ای باشد که تأثیر کلی سیستم کنترل، بازخورد منفی باشد. به عبارت دیگر، ما باید فرستنده را طوری پیکربندی کنیم که موتور داغتر منجر به افزایش جریان خنک کننده شود (شیر کنترل بازتر).
از آنجایی که می دانیم بقیه سیستم به گونه ای طراحی شده است که یک سیگنال حداقلی در هر جایی که تمایل دارد شیر کنترل را به حالت ایمن خرابی خود سوق دهد ( کاملا باز)، باید یک ترانسمیتر با عملکرد معکوس انتخاب کنیم، بنابراین موتور داغتر منجر به کاهش میلی آمپر می شود. (سیگنال از فرستنده)
اگر ترانسمیتر دارای یک سوئیچ حالت “سوختگی” حسگر باشد، باید این سوئیچ را در موقعیت فرسودگی مقیاس پایین قرار دهیم، بنابراین یک سنسور سوخته منجر به خروجی 4 میلی آمپر (پایین بودن مقیاس 4-20 میلی آمپر) می شود. سوپاپ را به ایمن ترین موقعیت (در حالت باز) هدایت می کند.
چنین پیکربندی با دریچه کنترل ولوپنوماتیک (هوا) بسته و یک ترانسمیتر با عملکرد معکوس ممکن است عجیب و غیرقابل درک به نظر برسد، اما ایمن ترین طراحی برای این سیستم خنک کننده موتور است.
ابتدا ایمنترین حالت خرابی شیر کنترلی را انتخاب کردیم، سپس اقدامات ابزار را طوری انتخاب کردیم که محتملترین خرابیهای مسیر سیگنال در هر نقطه از سیستم منجر به پاسخ یکسان و یکسان شیر شود.
البته ناگفته نماند که مستندات دقیق در قالب یک نمودار حلقه با اقدامات ابزار به وضوح نشان داده شده است، یک قطعه کاملاً ضروری از کل سیستم است.
اگر ایمنی یک سیستم کنترل به استفاده از هر گونه پیکربندی ابزار “غیر استاندارد” بستگی دارد، بهتر است این تنظیمات مستند شوند تا کسانی که سیستم را در آینده نگهداری می کنند بدانند چه انتظاری دارند.
یکی دیگر از جزئیات مهم در این سیستم، پیکربندی کنترلکننده به گونه ای است که نمایشگر اپراتور برای سیگنال خروجی همچنان به روشی بصری ثبت میشود: 0٪ هنوز باید نشان دهنده یک شیر کنترل بسته باشد، در حالی که 100٪ باید هنوز نشان دهنده یک شیر باز باشد.
در شرایطی که شیر پنوماتیک بسته است (سیگنال به بسته از دید کنترلر)، این بدان معنی است که کنترلر باید برای نشان دادن معکوس بر روی نمایشگر خروجی پیکربندی شود، به طوری که خروجی 4 میلی آمپر (شیر باز) را نشان دهد. 100٪ باز است و خروجی 20 میلی آمپر (شیر کاملا بسته) 0٪ را نشان می دهد.
همانطور که ممکن است این برای تکنسینی که باید کنترلر را سرویس کند گیج کننده باشد، مهم تر است که اپراتوری که از این کنترلر استفاده می کد هر روز کاری چیزی را ببیند که منطقی است.
در صورت وقوع یک وضعیت اضطراری، جزئیات «جزئی» مانند این بسیار مهم میشوند و اپراتور باید بر اساس نشانههایی که میبیند، تصمیمگیری در چند ثانیه بگیرد.
کیاصنعت نمایندگی کنترل ولو سامسون و تامین کننده انواع کنترل ولو، کنترل ولو پنوماتیک ، کنترل ولو سامسون ، کنترل ولو سه راهه سامسون، کنترل ولو سامسون مدل 3241 ،کنترل ولو ماسونیلان، کنترل ولو فیشر، کنترل ولو هانیول و… است.
از محصولات پر فروش ما می توان به آی توپی پوزیشنر سامسون ، اکچویتور سامسون، شیر پنوماتیک سامسون، گلوب ولو سامسون ، شیر تدریجی سامسون ، شیر ترموستاتیک سامسون و… اشاره کرد.
مقالات مرتبط: